

























Kuvaus
Zenmuse L2 LiDAR, korkean tarkkuuden IMU-järjestelmä ja 4/3 CMOS RGB -kamera, mikä tekee DJI:n drone-alustoista tarkemman, tehokkaamman ja luotettavamman paikkatiedon keräämisen. DJI Terran kanssa käytettynä se tarjoaa avaimet käteen -ratkaisun 3D-tiedonkeruuun ja erittäin tarkkaan jälkikäsittelyyn.

Korkea Tarkkuus
Vertikaalinen tarkkuus: 4 cm;
Horisonttaalinen tarkkuus: 5 cm
Huippu tehokas
2.5 km2 kattavuus yhdellä lennolla
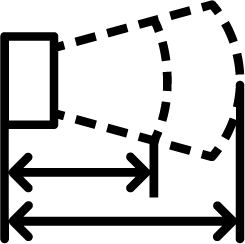
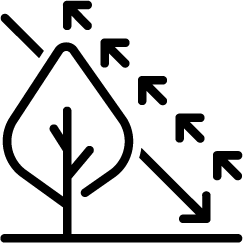
Parannettu läpäisykyky
Vähemmän haittaa kasvillisuuspeitteestä
Havaintoetäisyys
250m @10% heijastavuudella, 100klx
450m @50% heijastavuudella, 0klx
5 Heijastusta
Avaimet käteen ratkaisu
Poincloud LiveView
Yhden klikkauksen käsittely DJI Terrassa
Esimerkkejä:
Adams Surveying Stock Pile
Naval Air Station Alameda
Tree
Integroitu LIDAR ratkaisu
L2 voi mahdollistaa monimutkaisten ympäristöjen tarkan skannauksen laajennetulla kantamalla ja nopeammalla pistepilven toiminnalla.
Toiminnan aikana käyttäjät voivat esikatsella, toistaa ja käsitellä pistepilvimalleja paikan päällä DJI Terran luomilla laaturaporteilla, jotka tarjoavat yksinkertaisen ratkaisun, joka lisää tehokkuutta.
Tämän ansiosta käyttäjät voivat saavuttaa erittäin tarkkoja pistepilvituloksia helpolla jälkikäsittelyllä.

Korkean tason tarkkuus
Yhdistämällä GNSS:n ja patentoidun korkean tarkkuuden IMU:n tämä ratkaisu saavuttaa 4 cm:n pystytarkkuuden ja 5 cm:n vaakatarkkuuden.

Erinomainen tehokkuus
Heti käyttövalmis keräämään sekä geospatiaalista että RGB-dataa 2,5 km2:n alueelta yhdellä lennolla.

Intnovatiivinen ratkaisu
Yhdessä Matrice 350 RTK:n ja DJI Terran kanssa, L2 tarjoaa avaimet käteen -ratkaisun, joka on helppokäyttöinen.
Kehyspohjainen LiDAR
30% laajempi havaintoetøisyys
L2 pystyy havaitsemaan 250 metristä 10 %:n heijastuskyvyllä ja 100 klx:llä ja 450 metriin asti 50 %:n heijastuskyvyllä ja 0 klx:llä. Tyypillinen käyttökorkeus on 120 metrissø, mikä lisää merkittävästi käyttövarmuutta ja tehokkuutta.
Pienemmøt laserpisteet, tiheämmät pistepilvet
Pienennetty pistekoko 4 × 12 cm @ 100 m, on vain viidesosa L1:seen verrattuna. L2 ei vain havaitse pienempiä kohteita yksityiskohtaisemmin, vaan voi myös tunkeutua tiheämpään kasvillisuuteen ja luoda tarkempia digitaalisia korkeusmalleja (DEM).
5 Heijastusta
Tiheillø kasvipaikoilla L2 havaitsee maanpinnan lehtien alta helpommin ja tarkemmin.
Tehokas pistepilvi: 240 000 pts/s
Sekä yhden että usean palautuksen tilassa L2 voi saavuttaa maksimipistepilvipäästönopeuden 240 000 pistettä sekunnissa, mikä mahdollistaa useiden pistepilvitietojen hankinnan tietyllä aikavälillä.
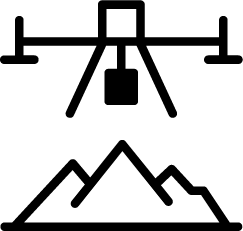
Kaksi skannaustilaa
L2 tukee kahta skannaustilaa, mikä tarjoaa käyttäjille joustavuutta heidän tehtävänsä mukaan. Toistuvassa skannaustilassa L2s LiDAR voi saavuttaa yhtenäisempiä ja tarkempia pistepilviä täyttäen samalla korkean tarkkuuden kartoitusvaatimukset. Ei-toistuvassa skannaustilassa se tarjoaa syvemmän tunkeutumisen rakenteellisiin tietoihin, mikä tekee siitä sopivan voimalinjojen tarkastuksiin, metsätaloustutkimuksiin ja muihin skenaarioihin.
Kehyspohjainen suunnittelu
Kehyspohjaisen suunnittelun tuloksena tehokas pistepilvinopeus. Yhdessä kolmiakselisen gimbalin kanssa se tarjoaa enemmän mahdollisuuksia kartoitusskenaarioihin.
Erittäin tarkka IMU-järjestelmä
Parempi tarkkuus
Erittäin tarkka IMU-järjestelmä yhdistettynä droonin RTK-paikannusjärjestelmään tietojen yhdistämistä varten jälkikäsittelyn aikana, antaa L2:lle pääsyn erittäin tarkkaan absoluuttiseen sijaintiin, nopeus- ja suuntatietoihin. Lisäksi IMU-järjestelmän laajennettu ympäristösopeutuvuus parantaa L2:n toimintavarmuutta ja tarkkuutta.
Yaw Accuracy
Sanntid: 0.2°, etterbehandling: 0.05°
Pitch/Roll Accuracy
Sanntid: 0.05°, etterbehandling: 0.025°
Ei IMU:n lämmitystä
IMU-järjestelmän suorituskykyä on parannettu merkittävästi ja se on käyttövalmis heti, kun se kytketään päälle. Drone on siis valmis aloittamaan tehtävät välittömästi, kun RTK on FIX-tilassa, mikä tarjoaa optimoidun kokemuksen kentällä.
RGB Mapping Camera

4/3 CMOS, Mekaanisella sulkimella
Pikselikoko on kasvatettu 3,3 μm:iin, ja tehokkaat pikselit saavuttavat nyt 20 megapikseliä, mikä parantaa huomattavasti yleistä kuvankäsittelyä sekä pistepilvien yksityiskohtia todellisissa väreissä. Valokuvauksen vähimmäisväli on lyhennetty 0,7 sekuntiin. Kameran mekaanisen sulkimen käyttöikä on jopa 200 000 valotusta, mikä vähentää käyttökustannuksia entisestään. Kun pistepilvikeräystä ei vaadita, RGB-kamera voi silti kaapata kuvia ja videoita tai kerätä kuvia näkyvän valon kartoittamista varten.
Erilaiset lentoreittityypit
Tukee reittipiste-, alue- ja lineaarisia reittityyppejä kartoitustehtävien käsittelyyn erilaisissa ympäristöissä.
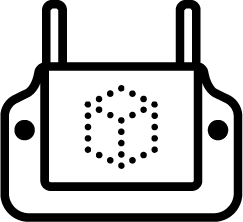
Pistepilvi LiveView
Käytön aikana DJI Pilot 2 tukee kolmea näyttötilaa – RGB, pistepilvi ja pistepilvi/RGB rinnakkainen näyttö, joka näyttää käyttötulokset intuitiivisella tavalla. RNG:n (Laser Rangefinder) aktivointi mahdollistaa pääsyn LiDAR-moduulin ja FOV:n keskellä olevan kohteen välisiin etäisyystietoihin, mikä lisää lentoturvallisuutta. Se tukee myös neljää reaaliaikaista pistepilviväritilaa – Heijastus, Korkeus, Etäisyys ja RGB.
Pistepilvimalli / Toisto ja yhdistäminen
Lennon jälkeen kerättyä pistepilvimallia voi katsella suoraan albumista 3D:nä. Useiden toimintojen pistepilvimalleja voidaan myös yhdistää, mikä mahdollistaa toiminnan laatua koskevan päätöksenteon paikan päällä.
Automaattisesti luodut tehtävät / laaturaportti
Pistepilvitietojen keräämisen jälkeen DJI Pilot 2 -sovellus luo automaattisesti toiminnalle laaturaportin, jotta operaattorit voivat tarkistaa toiminnan tulokset reaaliajassa ja paikan päällä, mikä tekee kenttätyöstä reagoivampaa ja huolettomampaa.
PPK ratkaisu
Monimutkaisissa käyttöympäristöissä käyttäjät voivat määrittää RTK-tukiasemat ennen käyttöä välttääkseen RTK-datan katoamisen häiriöistä, videon lähetyksen katkeamisesta tai muista ongelmista. Toimenpiteen jälkeen tuo alkuperäiset tiedostot DJI Terraan käyttääksesi PPK-prosessia (post-processing kinematic) korkean tarkkuuden mallien uudelleenrakentamiseksi.
Yhden klikkauksen käsittely DJI Terrassa
Saavuta tehokas ja luotettava jälkikäsittely, kun tuot pistepilvitietoja DJI Terraan. Luo vakiomuotoinen 3D-pistepilvimalli yhdellä napsautuksella pistepilven liikeradan laskennalla ja tarkkuuden optimoinnilla. Maapisteiden luokituksen jälkeen voidaan luoda DEM käyttämällä Ground Point Type -tyyppiä. Pistepilven laatua voidaan analysoida Accuracy Control and Check -ominaisuuden avulla.
General
-
Product Name
-
Zenmuse L2
-
Dimensions
-
155×128×176 mm (L×W×H)
-
Weight
-
905±5 g
-
Power
-
28 W (typical)
58 W (max.)
-
IP Rating
-
IP54
-
Supported Aircraft
-
Matrice 300 RTK (requires DJI RC Plus)
Matrice 350 RTK
-
Storage Temperature
-
-20° to 60° C (-4° to 140° F)
System Performance
-
Detection Range
-
450m @50% reflectivity, 0 klx
250m @10% reflectivity, 100 klxTypical data. Measured using a flat subject with a size larger than the laser beam diameter, perpendicular angle of incidence, and an atmospheric visibility of 23 km. In low-light environments, the laser beams can achieve the optimal detection range. If a laser beam hits more than one subject, the total laser transmitter power is split, and the achievable range is reduced. The maximum detection range is 500 m.
-
Point Cloud Rate
-
Single return: max. 240,000 pts/s
Multiple returns: max. 1,200,000 pts/s
-
System Accuracy
-
Horizontal: 5 cm @ 150 m
Vertical: 4 cm @ 150 mMeasured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered up. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). Using repetitive scanning with the RTK in the FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m. The field contained objects with obvious angular features, and used exposed hard ground check points that conformed to the diffuse reflection model. DJI Terra was used for post-processing with Optimize Point Cloud Accuracy enabled. Under the same conditions with Optimize Point Cloud Accuracy not enabled, the vertical accuracy is 4 cm and the horizontal accuracy is 8 cm.
-
Real-Time Point Cloud Coloring Coding
-
Reflectivity, Height, Distance, RGB
LiDAR
-
Ranging Accuracy (RMS 1σ)
-
2 cm @ 150 m
Measured in an environment of 25° C (77° F) with a subject of 80% reflectivity at a distance of 150 m. The actual environment may differ from the testing environment. The figure listed is for reference only.
-
Maximum Returns Supported
-
5
-
Scanning Modes
-
Non-repetitive scanning pattern, Repetitive scanning pattern
-
FOV
-
Repetitive scanning pattern: Horizontal 70°, Vertical 3°
Non-repetitive scanning pattern: Horizontal 70°, Vertical 75°
-
Minimum Detection Range
-
3 m
-
Laser Beam Divergence
-
Horizontal 0.2 mrad, Vertical 0.6 mrad
Measured at full width at half maximum (FWHM) conditions. 0.6 mrad signifies that for every 100m increase in distance, the diameter of the laser beam expands by 6 cm.
-
Laser Wavelength
-
905 nm
-
Laser Spot Size
-
Horizontal 4 cm, vertical 12 cm @ 100 m (FWHM)
-
Laser Pulse Emission Frequency
-
240 kHz
-
Laser Safety
-
Class 1 (IEC 60825-1:2014)
-
Accessible Emission Limit (AEL)
-
233.59 nJ
-
Reference Aperture
-
Effective Aperture: 23.85 mm (equivalent to circular)
-
Max Laser Pulse Emission Power Within 5 Nanoseconds
-
46.718 W
Inertial Navigation System
-
IMU Update Frequency
-
200 Hz
-
Accelerometer Range
-
±6 g
-
Angular Velocity Meter Range
-
±300 dps
-
Yaw Accuracy (RMS 1σ)
-
Real-time: 0.2°, Post-processing: 0.05°
Measured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered up. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). RTK in the FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m.
-
Pitch/Roll Accuracy (RMS 1σ)
-
Real-time: 0.05°, Post-processing: 0.025°
Measured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered up. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). RTK in the FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m.
-
Horizontal Positioning Accuracy
-
RTK FIX: 1 cm + 1 ppm
-
Vertical Positioning Accuracy
-
RTK FIX: 1.5 cm + 1 ppm
RGB Mapping Camera
-
Sensor
-
4/3 CMOS, Effective Pixels: 20 MP
-
Lens
-
FOV: 84°
Format Equivalent: 24 mm
Aperture: f/2.8-f/11
Focus Points: 1 m to ∞ (with autofocus)
-
Shutter Speed
-
Mechanical Shutter: 2-1/2000 s
Electronic Shutter: 2-1/8000 s
-
Shutter Count
-
200000
-
Photo Size
-
5280×3956 (4:3)
-
Still Photography Modes
-
Single shot: 20 MP
Timed: 20 MP
JPEG Timed Interval: 0.7/1/2/3/5/7/10/15/20/30/60 s
RAW/JPEG + RAW Timed Interval: 2/3/5/7/10/15/20/30/60 s
-
Video Codec and Resolution
-
H.264
4K: 3840×2160@30fps
FHD: 1920×1080 @30fps
-
ISO
-
Video: 100-6400
Photo: 100-6400
-
Video Bitrate
-
4K: 85Mbps
FHD: 30 Mbps
-
Supported File System
-
exFAT
-
Photo Format
-
JPEG/DNG (RAW)
-
Video Format
-
MP4 (MPEG-4 AVC/H.264)
Gimbal
-
Stabilization System
-
3-axis (tilt, roll, pan)
-
Angular Vibration Range
-
0.01°
-
Mounting
-
Detachable DJI SKYPORT
-
Mechanical Range
-
Tilt: -143° to +43°
Pan: ±105°* Structural limit, not controllable range.
-
Controllable Range
-
Tilt: -120° to +30°
Pan: ±90°
-
Operation Mode
-
Follow/Free/Re-center
Data Storage
-
Raw Data Storage
-
Photo/IMU/Point cloud/GNSS/Calibration files
-
Point Cloud Data Storage
-
Real-time modeling data storage
-
Supported microSD Cards
-
microSD: Sequential writing speed 50 MB/s or above and UHS-I Speed Grade 3 rating or above; Max capacity: 256 GB. Use the recommended microSD cards.
-
Recommended microSD Cards
-
Lexar 1066x 64GB U3 A2 V30 microSDXC
Lexar 1066x 128GB U3 A2 V30 microSDXC
Kingston Canvas Go! Plus 128GB U3 A2 V30 microSDXC
Lexar 1066x 256GB U3 A2 V30 microSDXC
Post-Processing
-
Supported Software
-
DJI Terra
-
Data Format
-
DJI Terra supports exporting point cloud models in the following formats:
PNTS/LAS/PLY/PCD/S3MB



